GapFlyt - Open Source Solution for the Drones' Biggest Problem
GapFlyt
Open Source Solution for the Drones' Biggest Problem
Screenshots
Hunter's comment
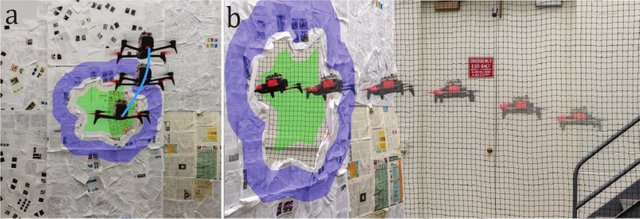
When a drone/quadrotor/quadcoptor passes through an unknown gap, there is a chance it'd collide with the sides. To solve this problem, researchers and practitioners have been using a 3D reconstruction of the scene, which is being inefficient as it is not task driven.
Now think about flying insects and birds, how do they navigate? No previously developed 3D map is available for them.
"We use this philosophy to design a minimalist sensori-motor framework for a quadrotor to fly though unknown gaps without a 3D reconstruction of the scene using only a monocular camera and onboard sensing."
Source
GitHub repository of GapFlyt. Click this for Hardware & Software Setup.
Link
http://prg.cs.umd.edu/GapFlyt.html
Contributors
Hunter: @mobi72

This is posted on Steemhunt - A place where you can dig products and earn STEEM.
View on Steemhunt.com
Hi @mobi72,
Thanks for yet another hunt. I’ve reviewed and approved it. The hunt is on.
Thank you.